Bio
I am a fifth-year Ph.D. student at MIT CSAIL, supervised by Prof. Wojciech Matusik. I received my M.Phil. from The Chinese University of Hong Kong and my Bachelor's degree from Tsinghua University.
My research brings the tradition of computational design and fabrication into the era of generative AI. My work began in geometry processing and physical simulation, and extends to the design of materials, biomolecules, and industrial products. Across these areas, I build physical constraints into the model itself, through geometric representations (medial skeletons, tetrahedral sphere primitives, procedural grammars) and differentiable solvers (Gauss-Seidel projection, quasi-harmonic maps, differentiable simulation), so that designs are valid by construction rather than by post-filtering:
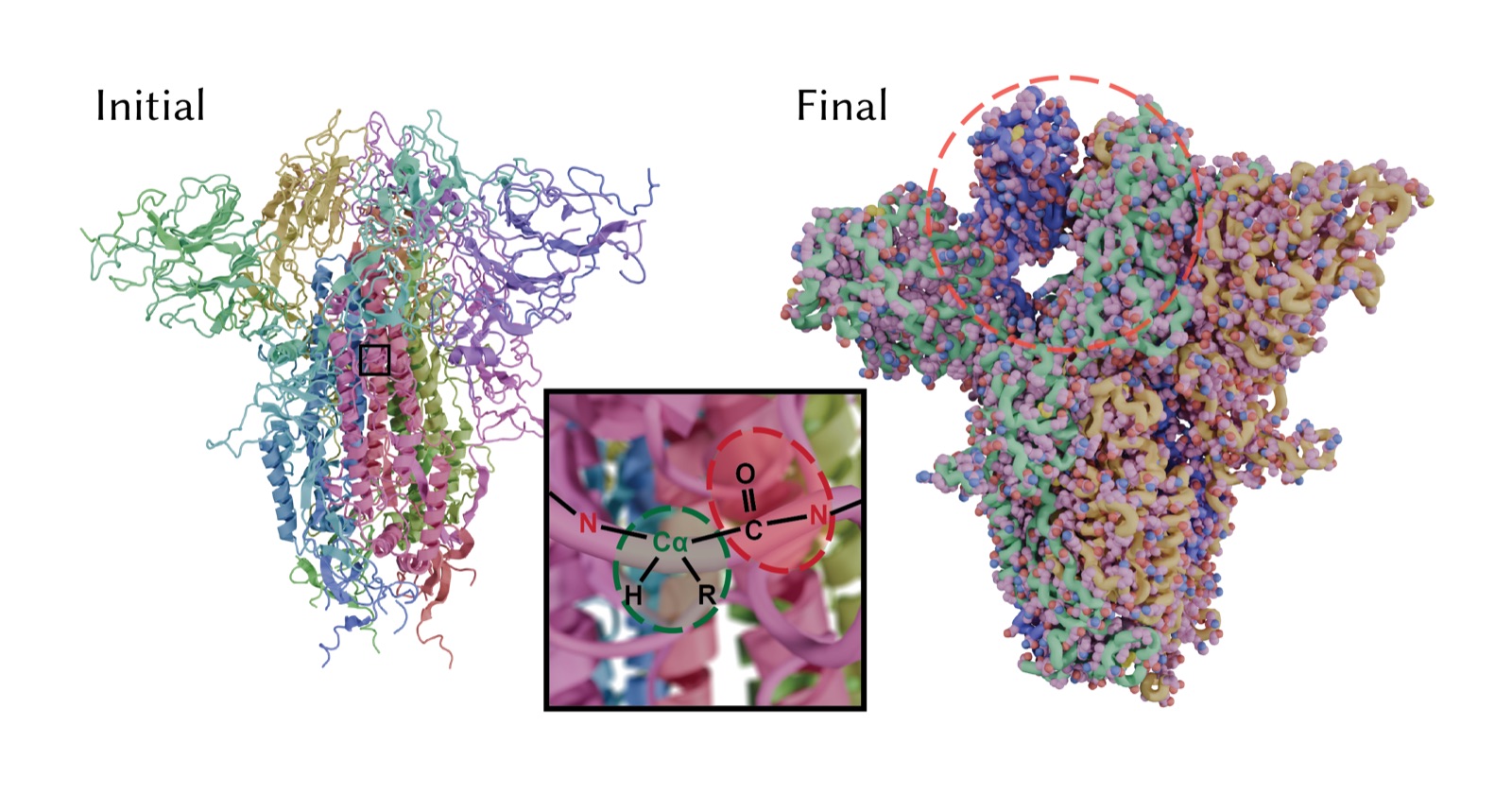
- Generative Design for Science: generating synthesizable molecules from small data (as few as 20 examples); predicting the structure of biomolecular complexes with a 10x wall-clock speedup over state-of-the-art models such as AlphaFold (fast enough for interactive protein design).
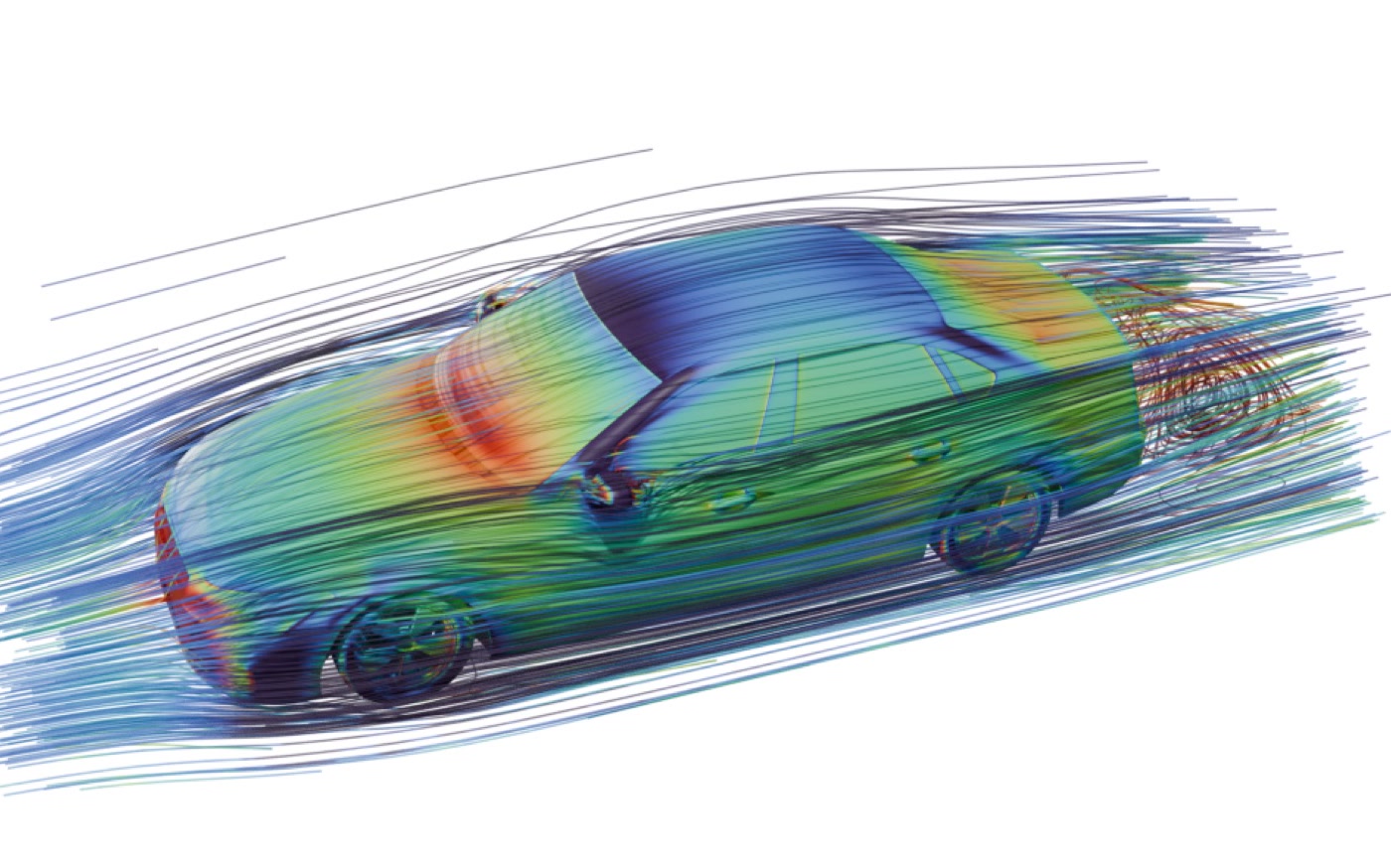
- Generative Design for Engineering: optimizing designs such as cars, aircraft, and ships against coupled aerodynamics, hydrodynamics, and solid mechanics (scalable to industrial complexity, 20 to 60% less labeled data); generating shapes with guaranteed manufacturability, ready for fabrication and 3D printing.
More broadly, my collaborators and I initiated Graphics4Science, a community agenda for making computer graphics a scientific instrument (SIGGRAPH 2025 Course, SIGGRAPH 2026 Workshop).
I am on the academic job market for the 2026–2027 cycle. Please feel free to contact me if you have any relevant opportunities!
News
- [2026/07] WorldParticle and S4R conditionally accepted to SIGGRAPH Asia 2026.
- [2026/07] Invited talk at Stanford University.
- [2026/07] Organizing two workshops at SIGGRAPH 2026: Graphics x Science and Generative AI for Computer Graphics.
- [2026/07] Kinematic Kitbashing (Technical Papers Trailer) and M-ABD presented at SIGGRAPH 2026.
- [2026/06] NeuralActuator received the Outstanding Systems Paper Award at RSS 2026.
- [2026/06] Invited talks at Yale University and UC San Diego.
- [2026/05] GeoPT and Axiomatic Atlas accepted to ICML 2026.
- [2026/04] GeoPT received the Best Paper Award at the ICLR 2026 Workshop on Foundation Models for Science.
Show moreShow less
- [2026/01] Gauss–Seidel Projection and PhyScensis accepted to ICLR 2026.
- [2025/03] Received the Meshy AI Fellowship (Outstanding Prize).
- [2025/01] TetSphere Splatting selected as an Oral Presentation at ICLR 2025 (acceptance rate 1.8%).
- [2024/12] Selected as a Finalist for the Roblox Fellowship.
- [2023/08] Received the MathWorks Fellowship.
- [2022/01] Data-Efficient Graph Grammar selected as an Oral Presentation at ICLR 2022 (acceptance rate 1.6%).
Selected Initiatives
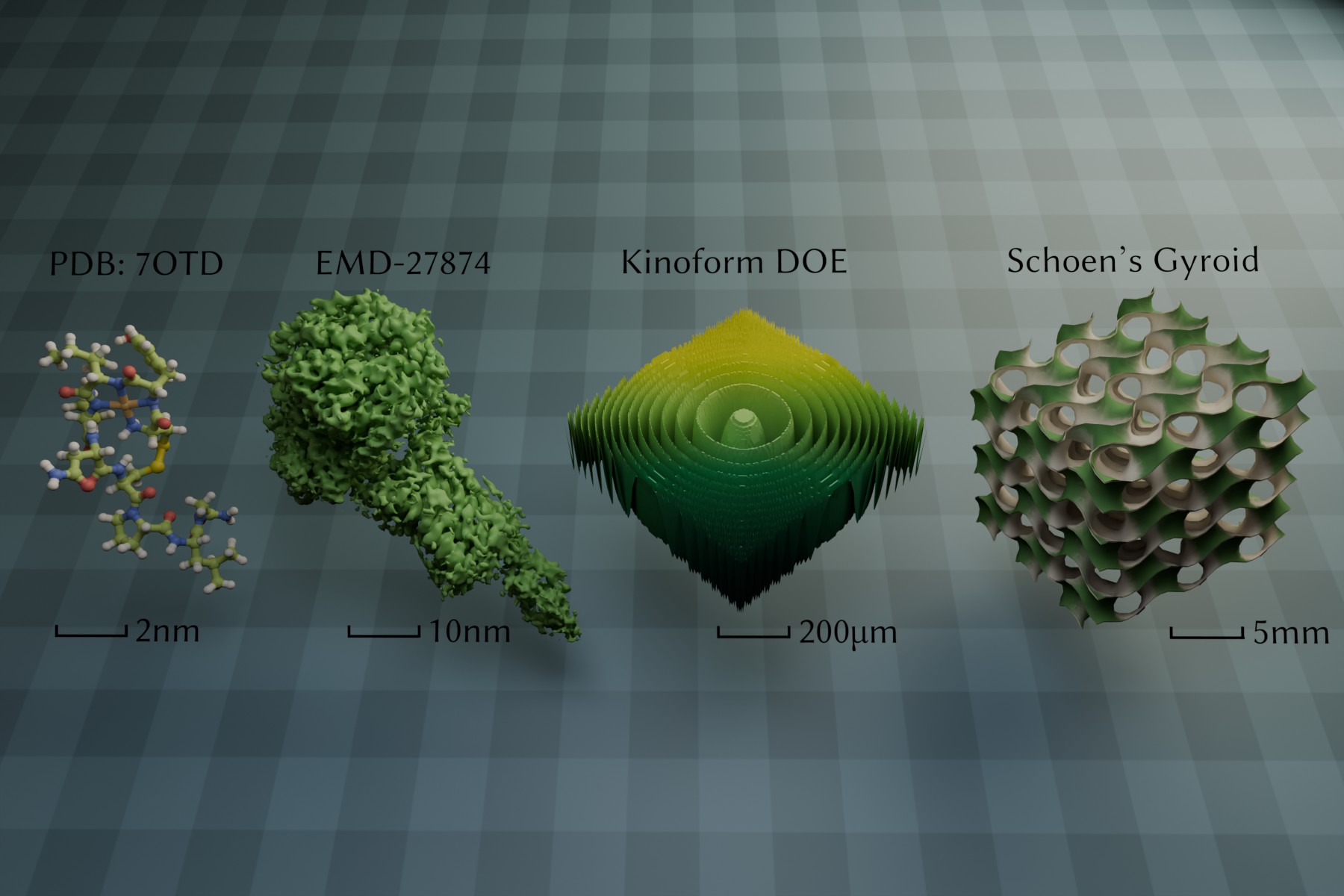
Graphics x Science 2026: Graphics for Cross-Scale Reliable Scientific Instruments
Minghao Guo,
Mina Konaković Lukovic,
Qixing Huang,
Yin Yang,
Chenfanfu Jiang,
Wojciech Matusik,
Peter Yichen Chen
SIGGRAPH Workshop 2026
Graphics4Science: Computer Graphics for Scientific Impacts
Peter Yichen Chen*,
Minghao Guo*,
Hanspeter Pfister,
Ming Lin,
William Freeman,
Qixing Huang,
Han-wei Shen,
Wojciech Matusik
SIGGRAPH Course 2025
Selected Publications
For the full publication list, please refer to my Google Scholar page.
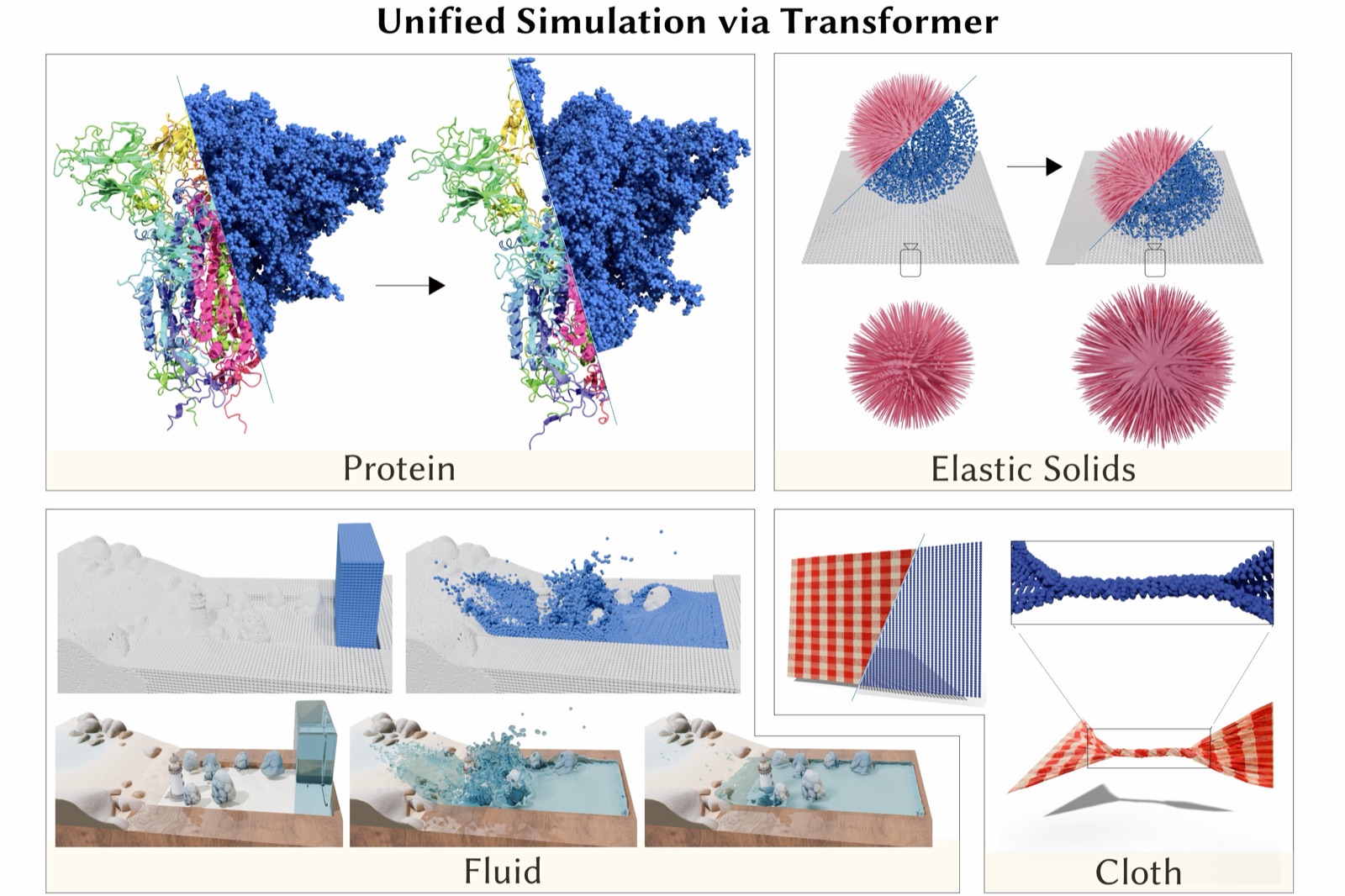
WorldParticle: Unified World Simulation of Lagrangian Particle Dynamics via Transformer
Caoliwen Wang*,
Minghao Guo*†,
Siyuan Chen*,
Heng Zhang,
Mengdi Wang,
Xingyu Ni,
Hanson Sun,
Kunyi Wang,
Zherong Pan,
Kui Wu,
Lingjie Liu,
Yin Yang,
Chenfanfu Jiang,
Taku Komura,
Wojciech Matusik,
Peter Yichen Chen†
SIGGRAPH Asia 2026 (conditionally accepted)
*=equal contribution, †=corresponding author
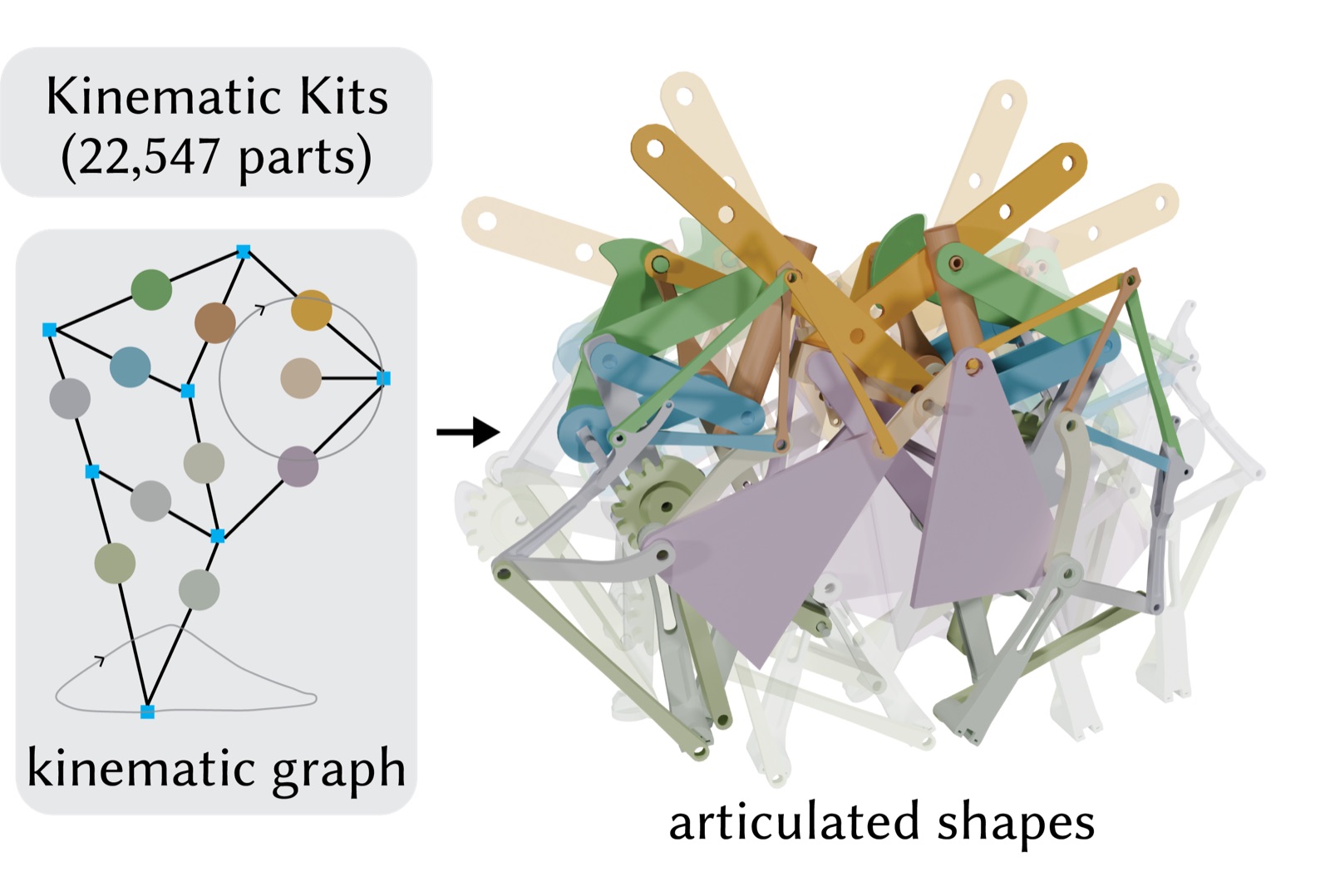
Kinematic Kitbashing
Minghao Guo,
Victor Zordan,
Sheldon Andrews,
Wojciech Matusik,
Maneesh Agrawala,
Hsueh-Ti Derek Liu
SIGGRAPH 2026 (Conference Track)
Featured in Technical Papers Trailer
M-ABD: Scalable, Efficient, and Robust Multi-Affine-Body Dynamics
Zhiyong He,
Dewen Guo,
Minghao Guo,
Yili Zhao,
Wojciech Matusik,
Hao Su,
Chenfanfu Jiang,
Peter Yichen Chen,
Yin Yang
SIGGRAPH 2026 (Journal Track)
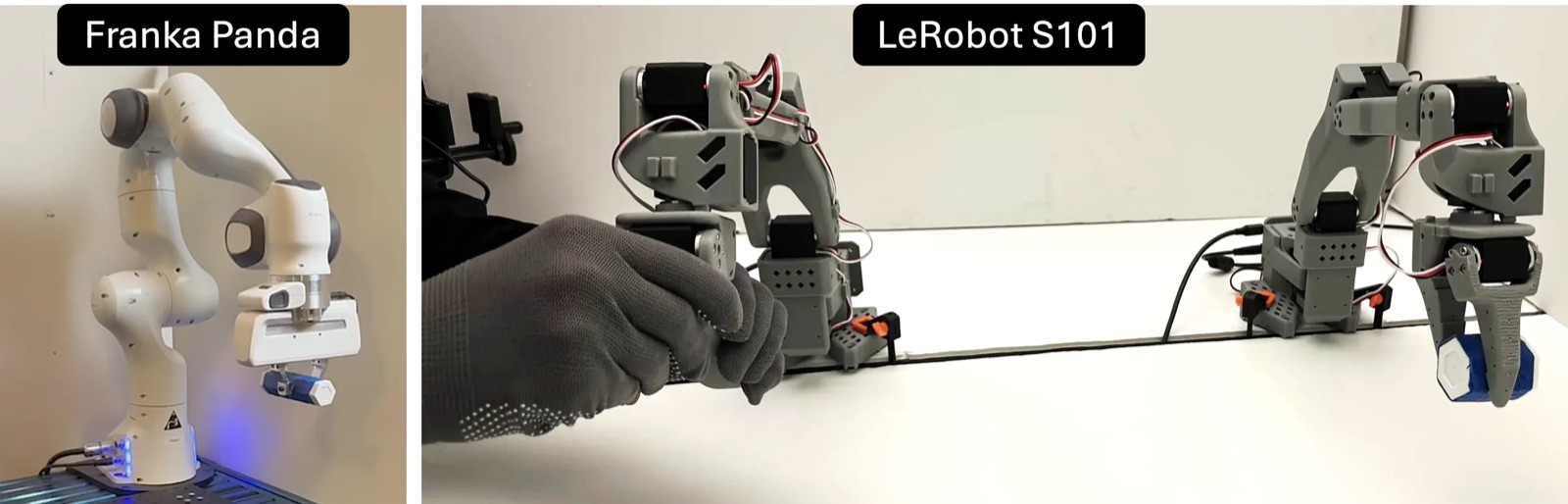
NeuralActuator: Neural Actuation Modeling for Robot Dynamics and External Force Perception
Zhiyang Dou,
John U. Onyemelukwe*,
Hangxing Zhang*,
Heng Zhang,
Minghao Guo,
Yunsheng Tian,
Michal Piotr Lipiec,
Joshua Jacob,
Chao Liu,
Peter Yichen Chen,
Yuri Ivanov,
Wojciech Matusik
Robotics: Science and Systems (RSS) 2026
Outstanding Systems Paper Award
*=equal contribution
GeoPT: Scaling Physics Simulation via Lifted Geometric Pre-Training
Haixu Wu*,
Minghao Guo*,
Zongyi Li,
Zhiyang Dou,
Mingsheng Long,
Kaiming He,
Wojciech Matusik
ICML 2026
Best Paper Award at ICLR 2026 Workshop on Foundation Models for Science
*=equal contribution
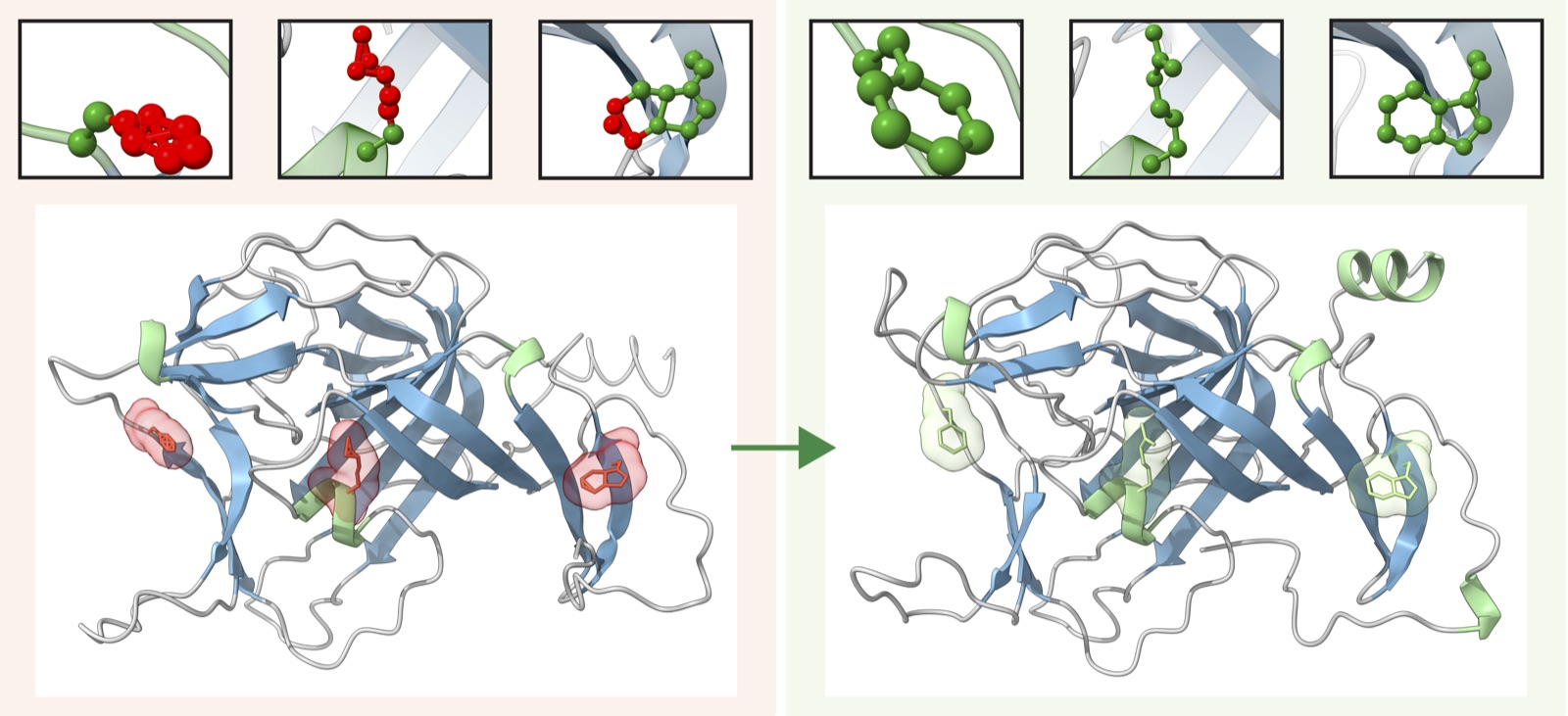
Physically Valid Biomolecular Interaction Modeling with Gauss-Seidel Projection
Siyuan Chen*,
Minghao Guo*†,
Caoliwen Wang,
Anka He Chen,
Yikun Zhang,
Jingjing Chai,
Yin Yang,
Wojciech Matusik,
Peter Yichen Chen†
ICLR 2026
*=equal contribution, †=corresponding author
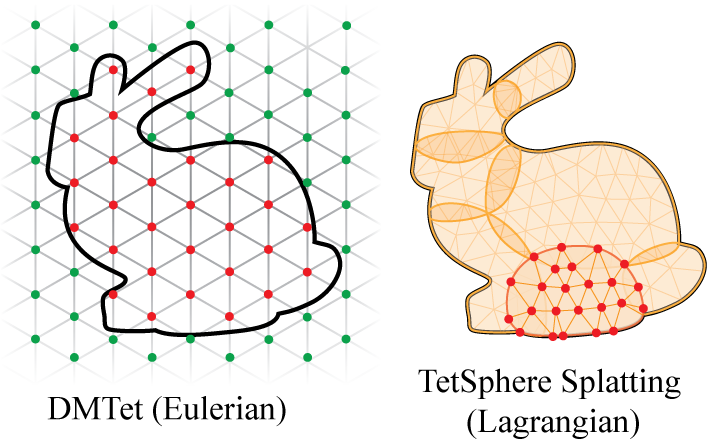
TetSphere Splatting: Representing High-Quality Geometry with Lagrangian Volumetric Meshes
Minghao Guo*,
Bohan Wang*,
Kaiming He,
Wojciech Matusik
ICLR 2025
Oral Presentation [acceptance rate: 1.8%]
*=equal contribution
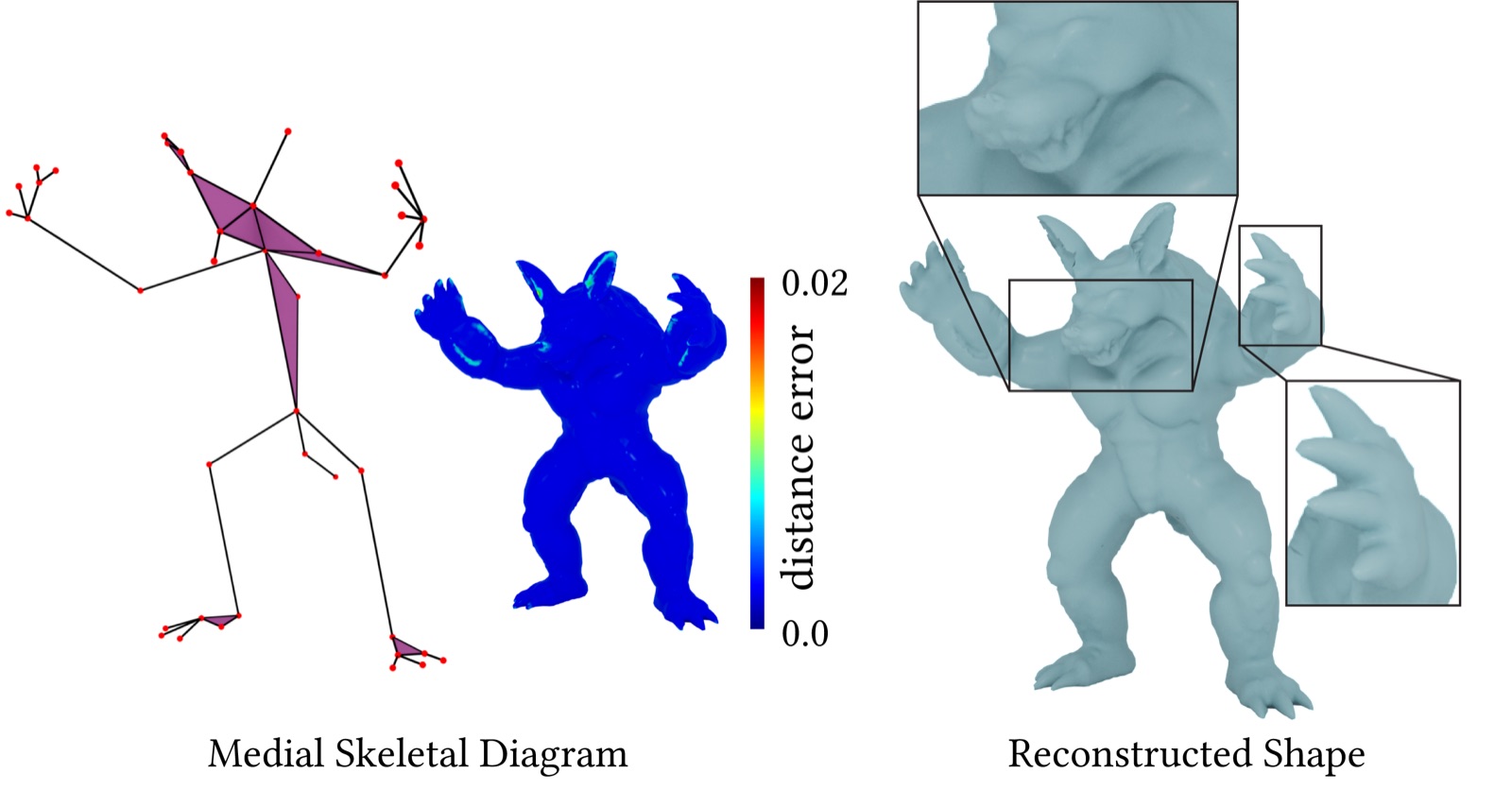
Medial Skeletal Diagram: A Generalized Medial Axis Approach for 3D Shape Representation
Minghao Guo*,
Bohan Wang*,
Wojciech Matusik
SIGGRAPH Asia 2024 (Journal Track)
*=equal contribution
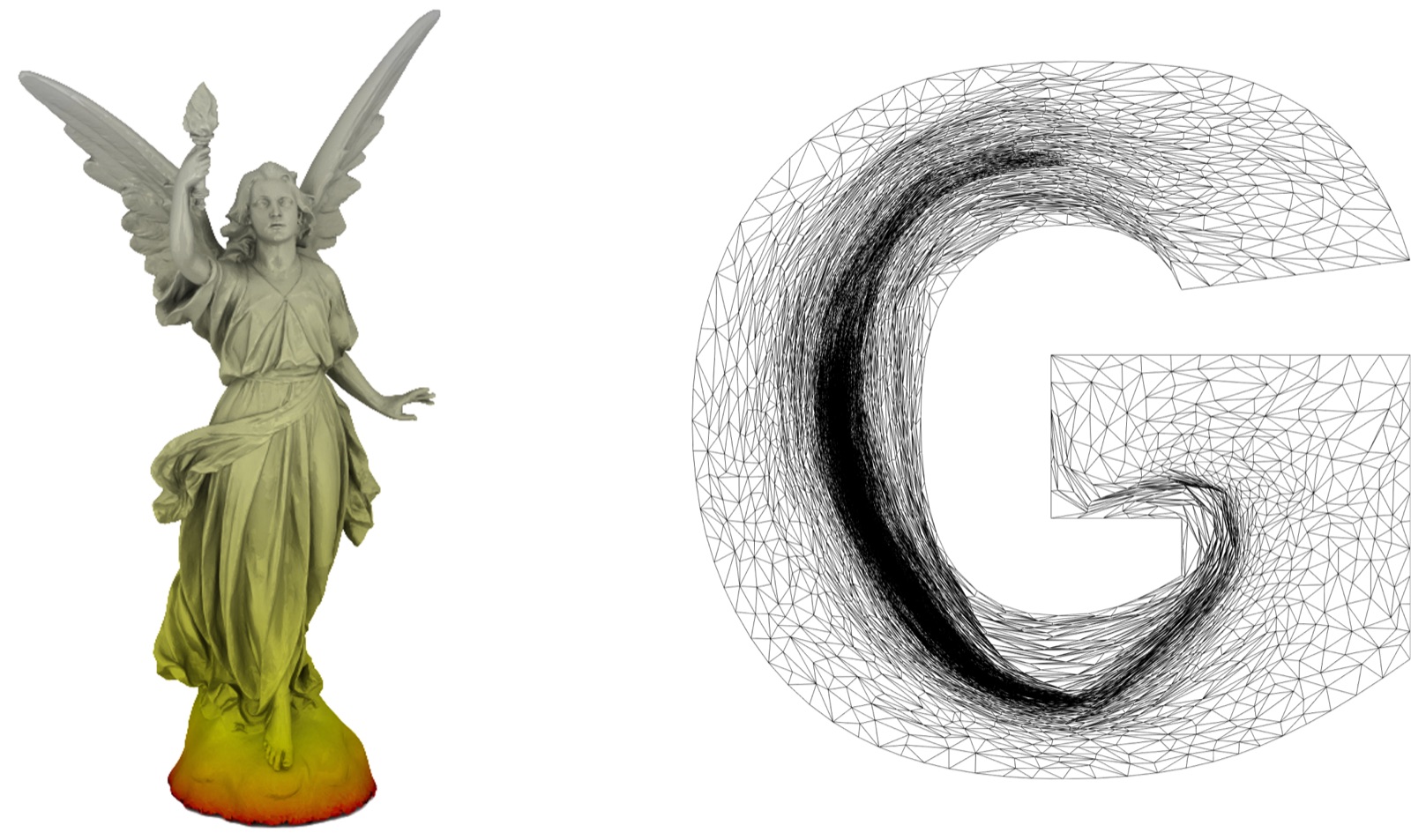
Variational Quasi-harmonic Maps for Computing Diffeomorphisms
Yu Wang,
Minghao Guo,
Justin Solomon
SIGGRAPH 2023 (Journal Track)
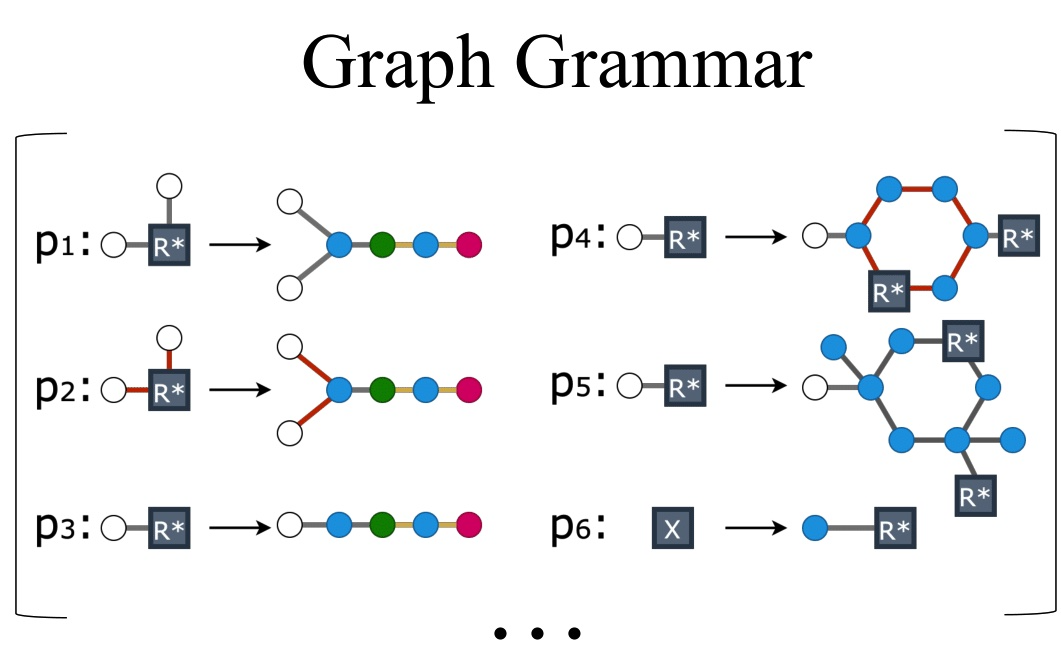
Data-Efficient Graph Grammar Learning for Molecular Generation
Minghao Guo,
Veronika Thost,
Beichen Li,
Payel Das,
Jie Chen,
Wojciech Matusik
ICLR 2022
Oral Presentation [acceptance rate: 1.6%]
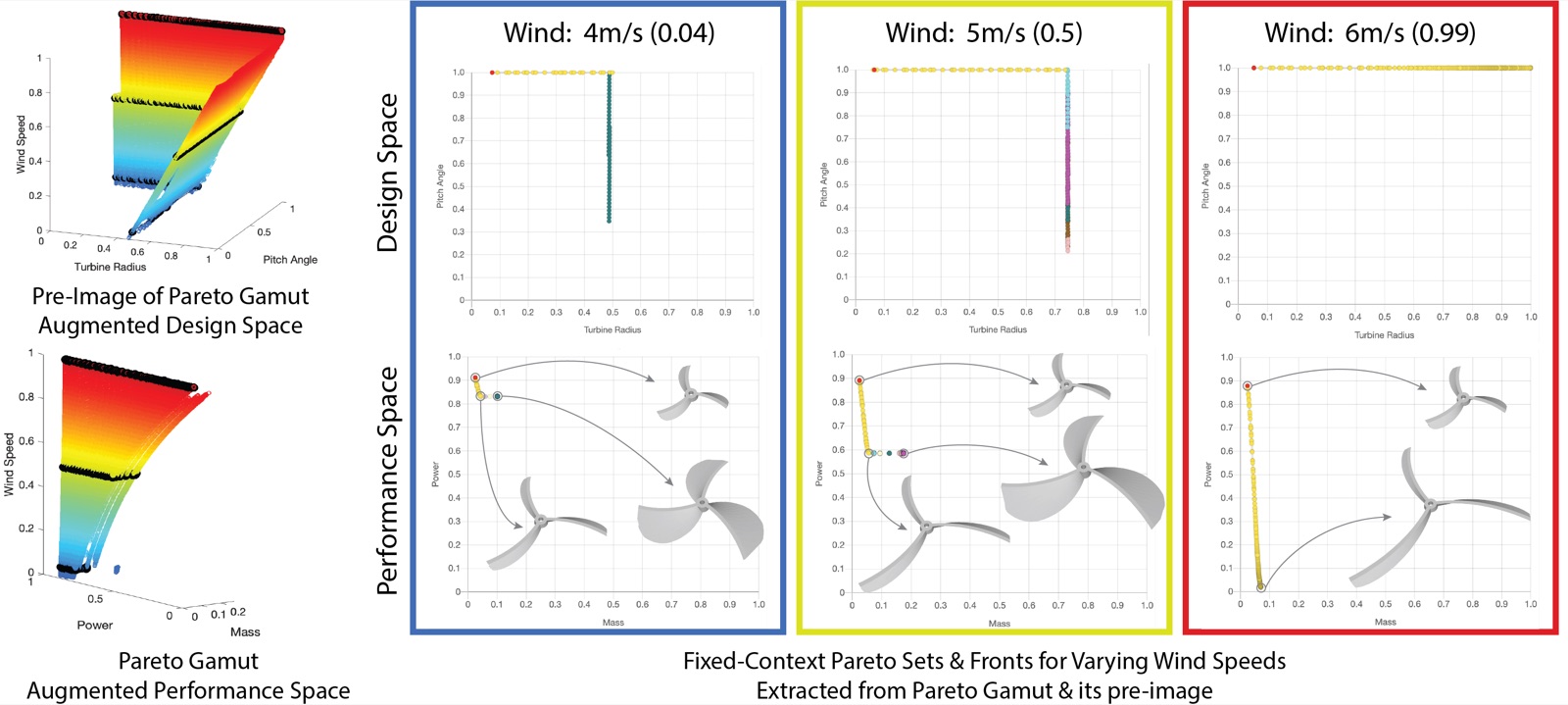
Pareto Gamuts: Exploring Optimal Designs Across Varying Contexts
Liane Makatura,
Minghao Guo,
Adriana Schulz,
Justin Solomon,
Wojciech Matusik
ACM Transactions on Graphics 2021 (SIGGRAPH 2021)
Awards
- [2026] Outstanding Systems Paper Award, Robotics: Science and Systems (RSS), for NeuralActuator
- [2026] Best Paper Award, ICLR Workshop on Foundation Models for Science, for GeoPT
- [2026] Gold Reviewer Award, ICML
- [2025] Meshy AI Fellowship, Outstanding Prize
- [2025] Roblox Fellowship, Finalist
- [2025] Cover image, Advanced Intelligent Systems, for Electronic-Free Particle Robots
- [2025] Oral Presentation, ICLR (acceptance rate 1.8%), for TetSphere Splatting
- [2024] MathWorks Fellowship ($105,000)
- [2022] Oral Presentation, ICLR (acceptance rate 1.6%), for Data-Efficient Graph Grammar
- [2021] Outstanding Reviewer Award, CVPR
Invited Talks
Building Unified Scientific World Simulators at Scale
- [2026/07] Stanford University
- [2026/06] Yale University
- [2026/06] University of California San Diego
- [2026/05] ByteDance Seed Team
- [2026/05] TechBeat
Neural Generative Design: Grounding Generative Models with Hollywood Physics
- [2026/04] Tsinghua University
- [2025/11] ByteDance Seed Team
- [2025/11] Boston University
- [2025/10] Boston Diffusion Day, Harvard University
- [2025/07] Google DeepMind
Press










Academic Services
Reviewer
- ACM SIGGRAPH North America @2024–2026
- ACM SIGGRAPH Asia @2025–2026
- International Conference on Learning Representations (ICLR) @2021–2026
- International Conference on Machine Learning (ICML) @2021–2026
- Conference on Neural Information Processing Systems (NeurIPS) @2021–2026
- Conference on Computer Vision and Pattern Recognition (CVPR) @2021–2024
- International Conference on Computer Vision (ICCV) @2021–2024
- European Conference on Computer Vision (ECCV) @2021–2024
- Pacific Graphics
Teaching
- Teaching Assistant, 6.S978 Deep Generative Models, MIT, for Prof. Kaiming He @Fall 2024
- Project Mentor, Summer Geometry Institute, MIT @Summer 2024
- Teaching Assistant, 6.4400 Computer Graphics, MIT, for Prof. Mina Konaković Luković @Fall 2023
- Teaching Assistant, CUHK @2019–2021